Plans and Skeptron
Behavior configuration and authority
Plans and Skeptron
How OctoMY™ defines robot behavior through Plans and manages authority through the Skeptron.
Did You Know?
The name "Skeptron" is derived from "scepter" - the ceremonial staff that represents royal authority. In OctoMY™, the Skeptron represents authority over a Plan, ensuring that only authorized operators can make a robot execute certain behaviors. This naming reflects OctoMY™'s philosophy that robots should remain under human control.
What is a Plan?
A Plan is a declarative document that describes all aspects of a node's behavior. Written in a JSON-based schema, it tells the node how to configure itself and respond to events.
Note: Plans were formerly called "Dogma" in earlier versions. Documentation using "Dogma" is outdated.
What plans configure
Plans cover many aspects of node operation:
Behavior
- Triggers and Actions - "When X happens, do Y"
- Directives - Standing orders for the node
- Event responses - How to react to sensor input
Resources
- Locations and areas - Map coordinates and regions
- Node references - Other nodes by ID
- Web services - External service URLs
- Shared secrets - Authentication tokens
Hardware
- Actuator configuration - Motor settings, limits
- Sensor configuration - Which sensors to use
- Lobe configuration - Locomotion type settings
Organization
- Grouping tags - Categories for nodes
- Node selectors - Dynamic groupings
Plan structure
A Plan contains:
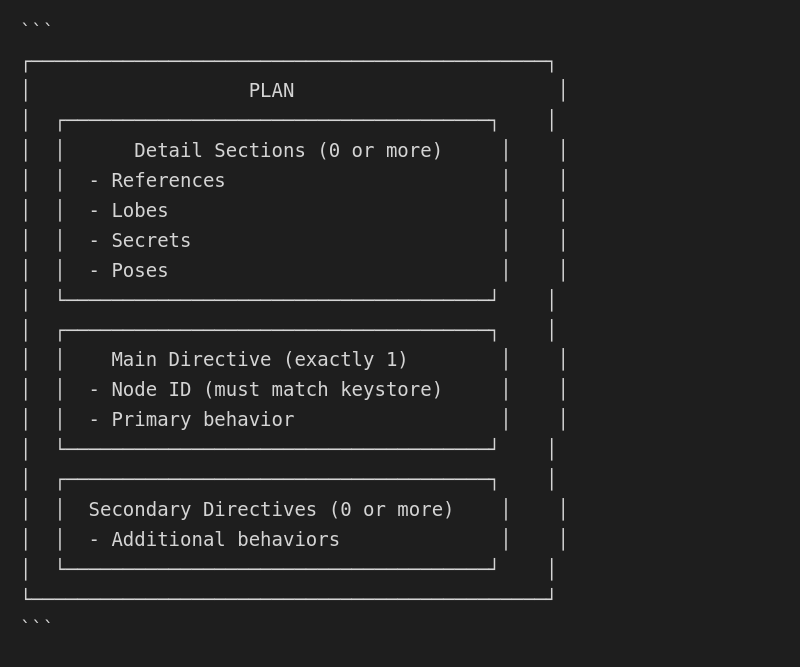
The main directive
The main directive must contain the node's ID, which must match the key-pair in the node's keystore. If this doesn't match, the robot enters a vegetative safety state and won't respond to commands.
References and inlining
Detail sections can be used two ways:
Inlined
{
"directive": {
"name": "patrol",
"secret": {"text": "patrol-auth-token"}
}
}
Referenced
{
"secret": {
"name": "patrol-secret",
"text": "patrol-auth-token"
},
"directive": {
"name": "patrol",
"secret": "#patrol-secret"
}
}
References (using #name) allow multiple directives to share the same detail section, reducing duplication and errors.
What is the Skeptron?
The Skeptron is a virtual "baton" or "scepter" designating authority to execute a Plan. It answers the question: "Who has the authority to make this Plan take effect?"
Key properties
- Held by operators, not nodes - The human user holds authority
- Transferable - Can be delegated to others
- Required for execution - Plans don't execute without Skeptron authority
- Auditable - Authority transfers are logged
Authority model
Trust requirement
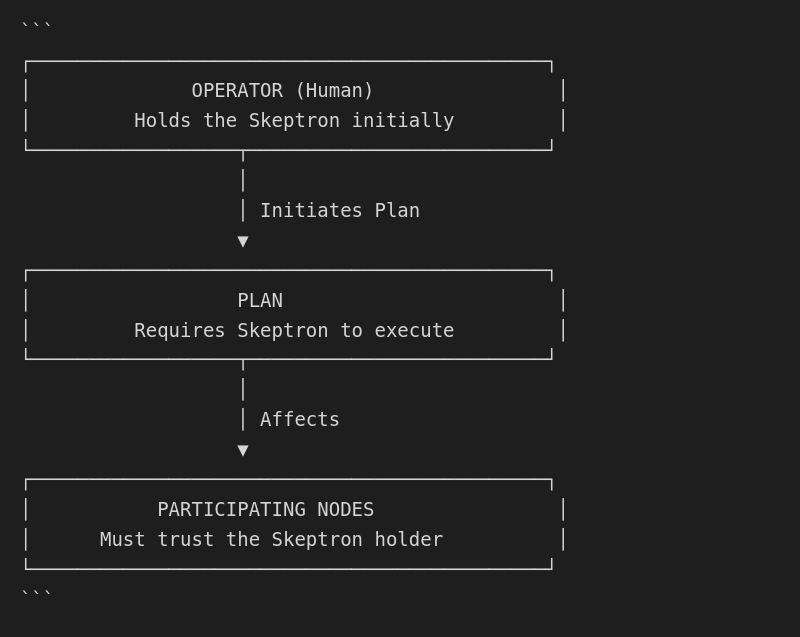
For a Plan to become effective:
- The Skeptron holder initiates execution
- Each participating node checks if it trusts the holder
- Only nodes that trust the holder accept the Plan
- Untrusted Plans are rejected
Operator vs node authority
A critical distinction:
| Entity | Identity | Authority |
|---|---|---|
| Node | Cryptographic key pair | Can communicate, store data |
| Operator | Separate authentication | Holds Skeptron, grants trust |
Operators can:
- Move between Remotes while retaining authority
- Transfer Skeptron to other operators
- Define chain-of-command for network splits
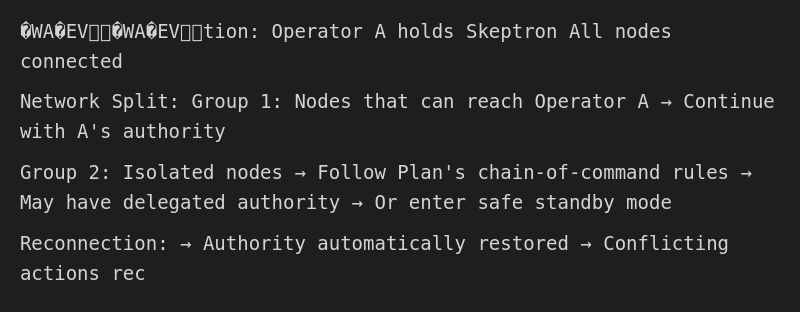
Network split handling
Plans can define what happens when network connectivity is lost:
Safety guarantees
The Plan/Skeptron system provides safety:
- No unauthorized execution - Plans require proper authority
- Explicit trust - Nodes choose what authority to accept
- Audit trail - All authority changes logged
- Fail-safe - Invalid Plans trigger safe mode