Architecture Overview
High-level system architecture
Architecture Overview
How OctoMY™'s components fit together to create a distributed robotics platform.
Did You Know?
OctoMY™'s architecture was designed with LLM integration in mind from day one. The embedded/strategic barrier ensures that even the most powerful AI cannot directly control motors - it must work through abstract targets that the embedded layer translates safely.
Design goals
OctoMY™'s architecture is built around these principles:
- Distributed Operation - No central server required for basic functionality
- Peer-to-Peer Security - End-to-end encryption between all nodes
- Graceful Degradation - System continues working despite network issues
- Modular Design - Components can be replaced or extended
- Local-First - Critical operations work without internet connectivity
System overview

Node types
OctoMY™ uses four node types, each with a specific role:
| Node | Purpose | Typical Hardware |
|---|---|---|
| Agent | Runs on the robot, controls actuators and sensors | Android phone, Raspberry Pi, embedded system |
| Remote | User interface for controlling Agents | Phone, tablet, desktop |
| Hub | Coordination and external service gateway | Server, workstation, cloud instance |
| Zoo | Discovery service for NAT traversal | Cloud server |
See Node Types for detailed descriptions.
Communication architecture
Nodes communicate using a custom UDP-based protocol optimized for real-time robotics:
Protocol stack
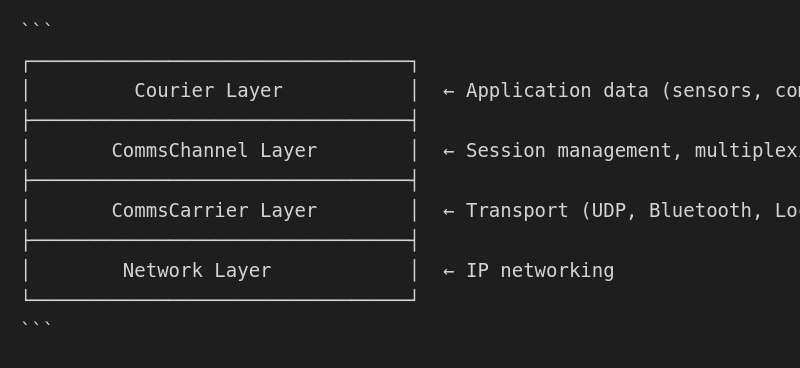
Key features
- Low latency - UDP-based for real-time control
- Bandwidth efficient - Minimal protocol overhead
- NAT traversal - Works across network boundaries via Zoo
- Selective reliability - Only critical messages use acknowledgment
Security architecture
Security is built into the foundation, not added as an afterthought:
- Cryptographic identity - Each node has an RSA key pair
- End-to-end encryption - All node-to-node traffic is encrypted
- Graduated trust - Six trust levels from Block to Depend
- Operator authority - Humans approve all trust decisions
See Security Model for details.
The embedded/strategic barrier
OctoMY™ enforces a strict separation between hardware control and high-level logic:
- Embedded Layer - Real-time actuator/sensor control with safety guarantees
- Strategic Layer - High-level planning, LLM integration, user interaction
LLMs and network commands can only affect actuators through abstract targets (e.g., "go to location X"), never through direct motor control.
See Embedded/Strategic Barrier for details.